Plant-like machines: can they help save our planet?
Inspired by the wonderful world of climbing plants, researchers from the Bioinspired Soft Robotics Laboratory of Istituto Italiano di Tecnologia created plant-like miniaturized machines for monitoring and preserving natural ecosystems.
In the 19th century, the world's most famous naturalist Charles Darwin said: "The more I study Nature, the more I become impressed with an ever-increasing force that the contrivances and beautiful adaptations slowly acquired through each part…which the most fertile imagination of man could invent.” Some years later, we are looking at the beautiful adaptations of Nature at the laboratories of BSR@IIT sited in Genoa (Italy), led by the biologist Barbara Mazzolai, to create artificial machines for preserving our planet.
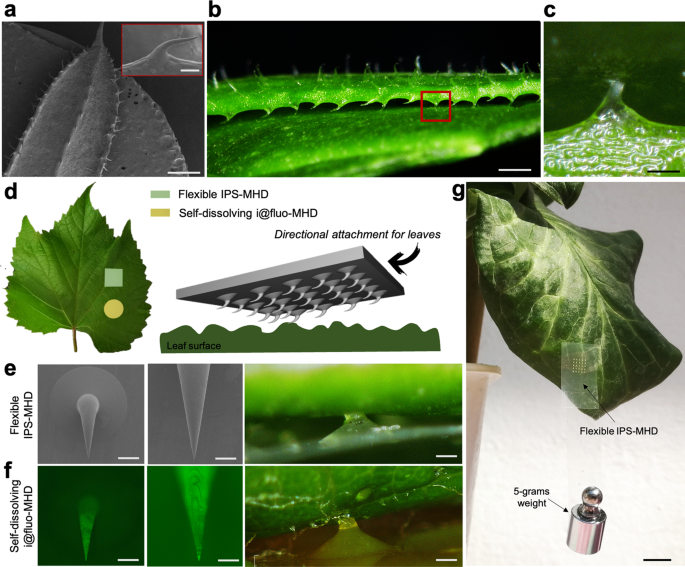
One of the most wonderful, albeit insidious, examples of adaptation is maybe given from the hook-climber Galium aparine L., which used a parasitic-like ratchet anchoring mechanism to climb always on the upper leaf sides of the plant hosts. This plant is very common in our gardens and forests, but we were the first that has been looked deeper at its leaf-attachment mechanism to propose bioinspired miniaturized machines capable to adapt to dense vegetation and work on it for in situ plant applications, like sensing and delivery. We created a sustainable solution by applying biology to technology and, in turn, we used this technology to better understand the physiological process of plants and preserve them!
Someday soon, these plant-inspired machines will be scattered everywhere in vineyards or forests and work toprovide capillary information on plant needs, improving outcomes while preserving resources and reducing the use of potential pollutants.
Plant-inspired miniature machines for preserving natural ecosystems
If you like to know more about this work read the full study here and stay tuned for more updates from our laboratories! Plant-inspired robots are coming soon...
This work was funded by the European Union’s Horizon 2020 Research and Innovation Programme under Grant Agreement No 824074 (GrowBot Project) and by the National Geographic Society (NGS) under Grant Agreement No EC-62190T-19.
References
1. Bauer, G., Klein, M. C., Gorb, S. N., Speck, T., Voigt, D., & Gallenmüller, F. (2011). Always on the bright side: the climbing mechanism of Galium aparine. Proceedings of the Royal Society B: Biological Sciences, 278(1715), 2233-2239.
2. Mazzolai, B., & Laschi, C. (2020). A vision for future bioinspired and biohybrid robots. Science Robotics, 5(38), eaba6893.
3. Fiorello, I., Tricinci, O., Naselli, G. A., Mondini, A., Filippeschi, C., Tramacere, F., Mishra A., & Mazzolai, B. (2020). Climbing Plant‐Inspired Micropatterned Devices for Reversible Attachment. Advanced Functional Materials, 30(38), 2003380.ù
4. Fiorello, I., Del Dottore, E., Tramacere, F., & Mazzolai, B. (2020). Taking inspiration from climbing plants: methodologies and benchmarks—a review. Bioinspiration & biomimetics, 15(3), 031001.
5. Fiorello, I., Meder, F., Mondini, A., Sinibaldi E., Filippeschi, C., Tricinci O. & Mazzolai, B. (2021) Plant-like hooked miniature machines for on-leaf sensing and delivery. Commun Mater2, 103.
Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in
With collections, you can get published faster and increase your visibility.
Chiral topological matter
This Collection brings together the latest advances in our understanding of quantum materials where the intertwining of chirality and topology gives rise to novel and unexpected phenomenology.
This Collection brings together the latest developments in the realization and optimization of memristive technologies for modern applications that take advantage of neural networks and neuromorphic computing.
Plant-like machines: can they help save our planet?
Inspired by the wonderful world of climbing plants, researchers from the Bioinspired Soft Robotics Laboratory of Istituto Italiano di Tecnologia created plant-like miniaturized machines for monitoring and preserving natural ecosystems.
This is a representation of how your post may appear on social media. The actual post will vary between social networks
Cookies
We use cookies to ensure the functionality of our website, to personalize content and advertising, to provide social media features, and to analyze our traffic. If you allow us to do so, we also inform our social media, advertising and analysis partners about your use of our website. You can decide for yourself which categories you want to deny or allow. Please note that based on your settings not all functionalities of the site are available.
Customise your preferences for any tracking technology
The following allows you to customize your consent preferences for any tracking technology used
to help us achieve the features and activities described below. To learn more about how these trackers help us
and how they work, refer to the cookie policy. You may review and change your preferences at any time.
These trackers are used for activities that are strictly necessary to operate or deliver the service you requested from us and, therefore, do not require you to consent.
These trackers help us to provide a personalized user experience by improving the quality of your preference management options, and by enabling the interaction with external networks and platforms.





Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in